02 · UAV Systems
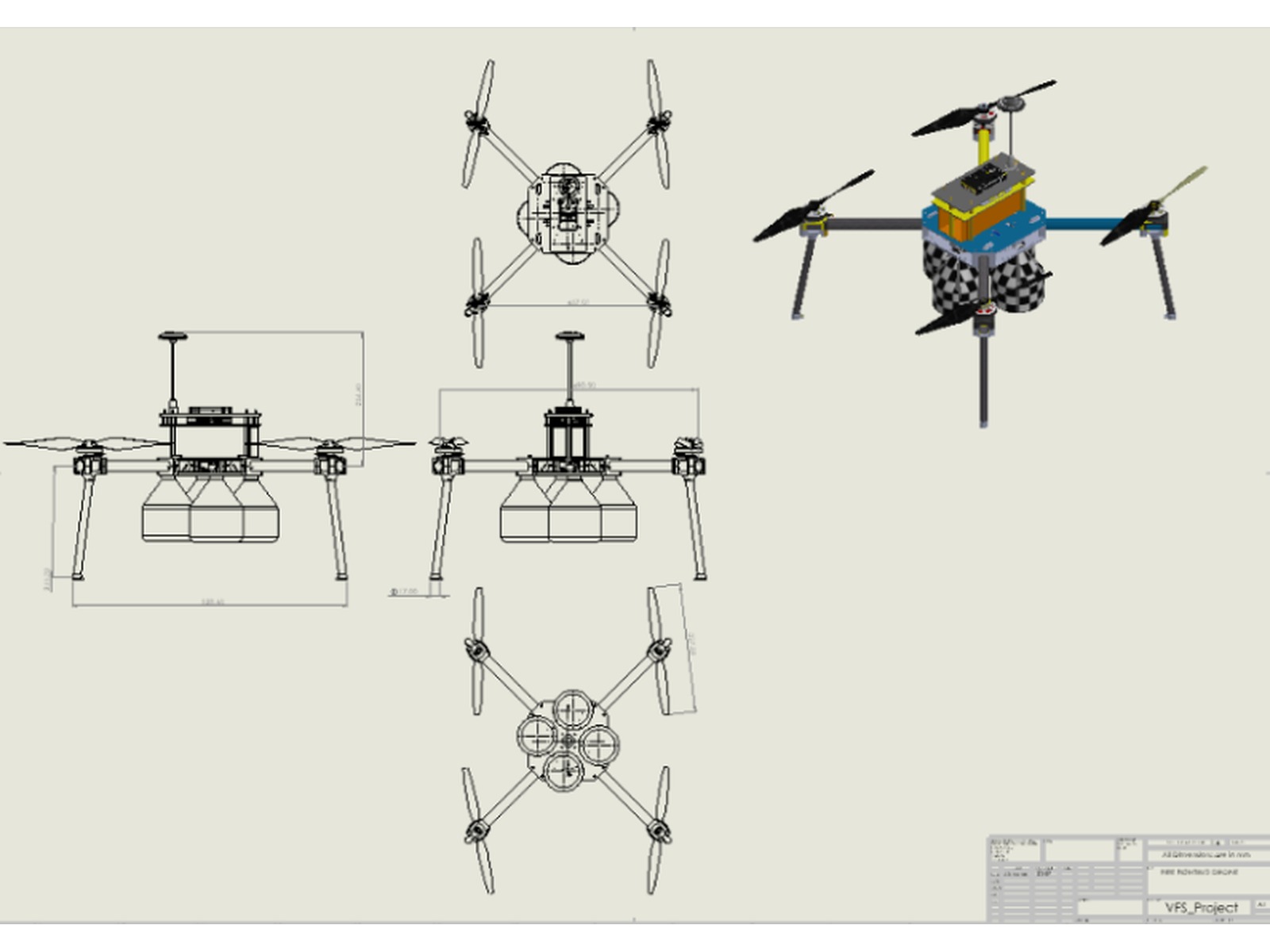
eVTOL Wildfire-Response Quadcopter
Team Whiplash · VFS Competition · Nov 2024 to June 2025
Remote-controlled electric VTOL quadcopter optimized for wildfire response: waypoint navigation, precision hover, and payload delivery, driven by a full avionics and Power Distribution stack.
- 49.6 N
- total thrust
- 1.26
- thrust-to-weight
- 6S / 80A
- power arch.
What
- Remote-controlled electric VTOL quadcopter built for the VFS competition.
- Optimized for wildfire response: waypoint nav, precision hover, payload delivery mechanism.
How
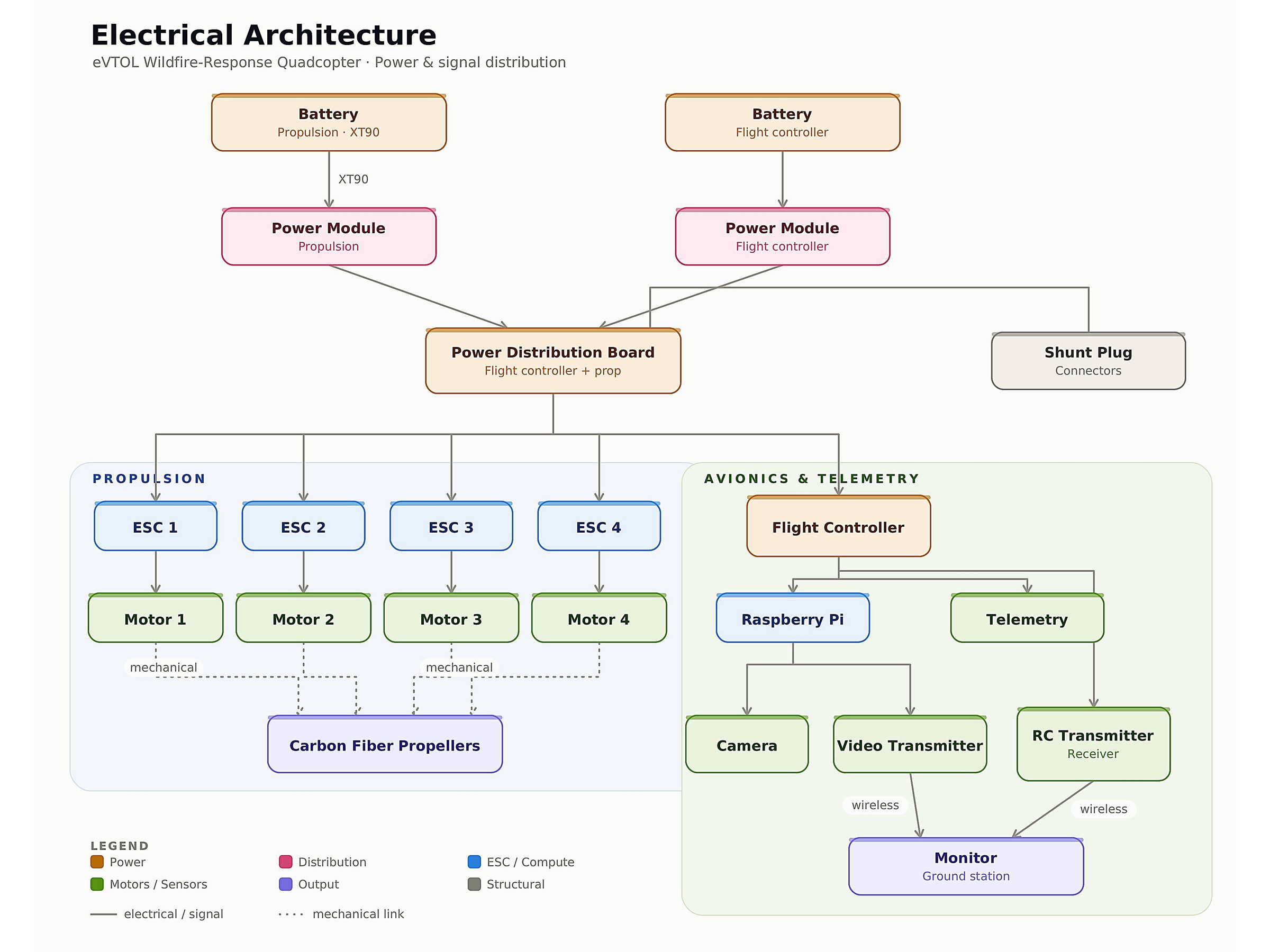
- Designed a dual-battery system: a 6S LiPo propulsion pack plus a dedicated FC battery.
- Wired four 80 A ESCs through a central Power Distribution board, with all Circuit Design and Soldering done in house.
- Integrated the Pixhawk Flight Controllers stack with a Raspberry Pi companion, telemetry, and RC links.
Results
- 49.6 N total thrust versus 39.2 N weight, a 1.26 thrust-to-weight ratio.
- Isolated FC power removes voltage sag under full motor load.
- Clean PWM signal chain gives stable thrust for hovering and payload drops.
Tools & methods
- Pixhawk 4
- Raspberry Pi
- Power distribution
- ESC config
- Harness design
Next project
Leading-Edge Slat Aerodynamics