01 · Design, Build, Test
Competition Robot
UC San Diego · Mechanical Design · Sept to Nov 2024
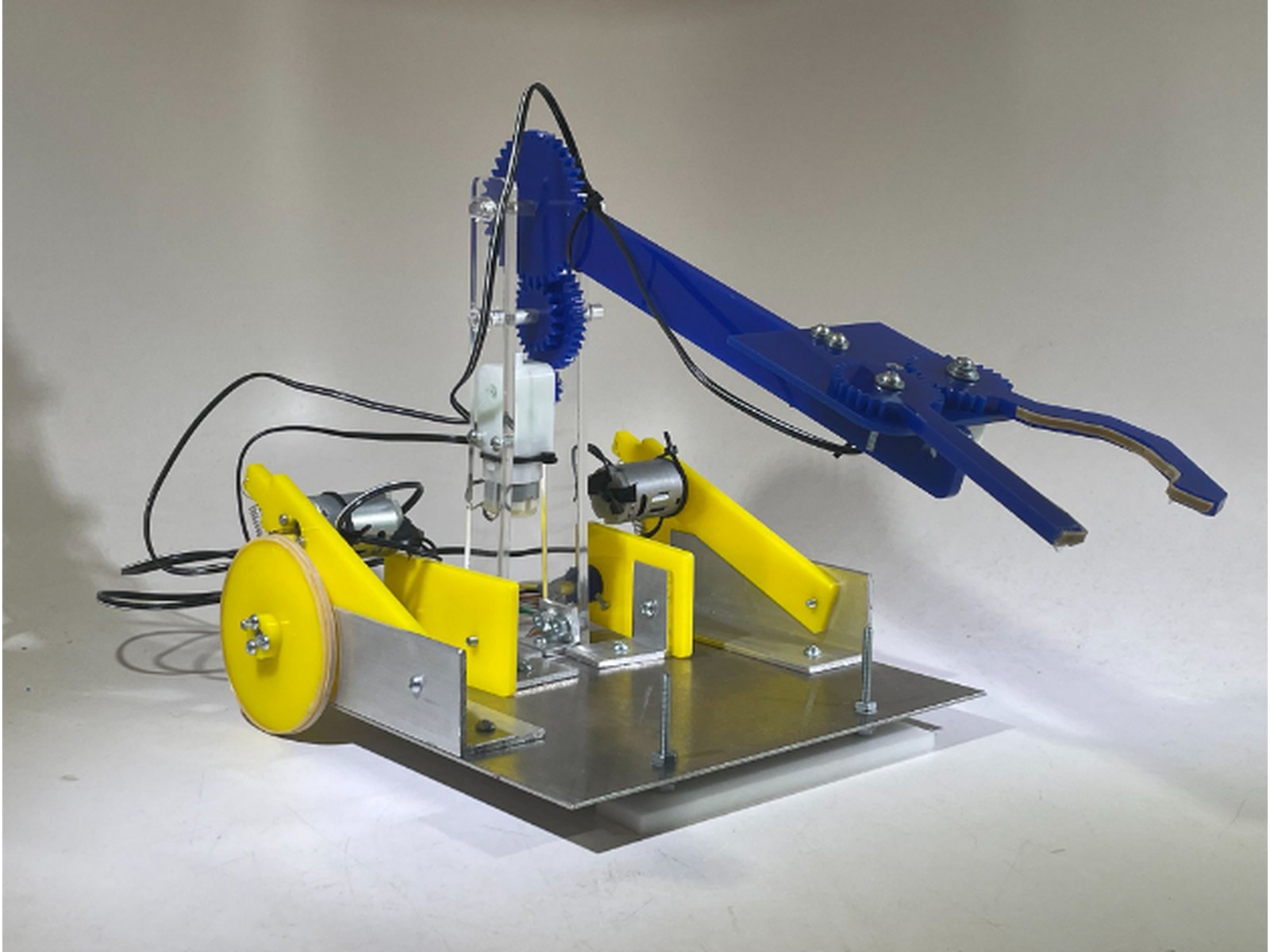
A compact robot that drives, rotates an arm, and grasps objects with a geared claw. Engineered end to end from concept sketches through scored competition runs using Fusion 360, GD&T, Soldering, and quasi-static force analysis.
- 3.48 N
- pushing force
- 250 g
- payload lifted
- 2×
- points vs. target
What
- Compact robot that drives, rotates an arm, and grasps objects with a geared claw.
- Built end to end: concept sketches, Pugh-chart selection, CAD, fabrication, and scored testing.
How
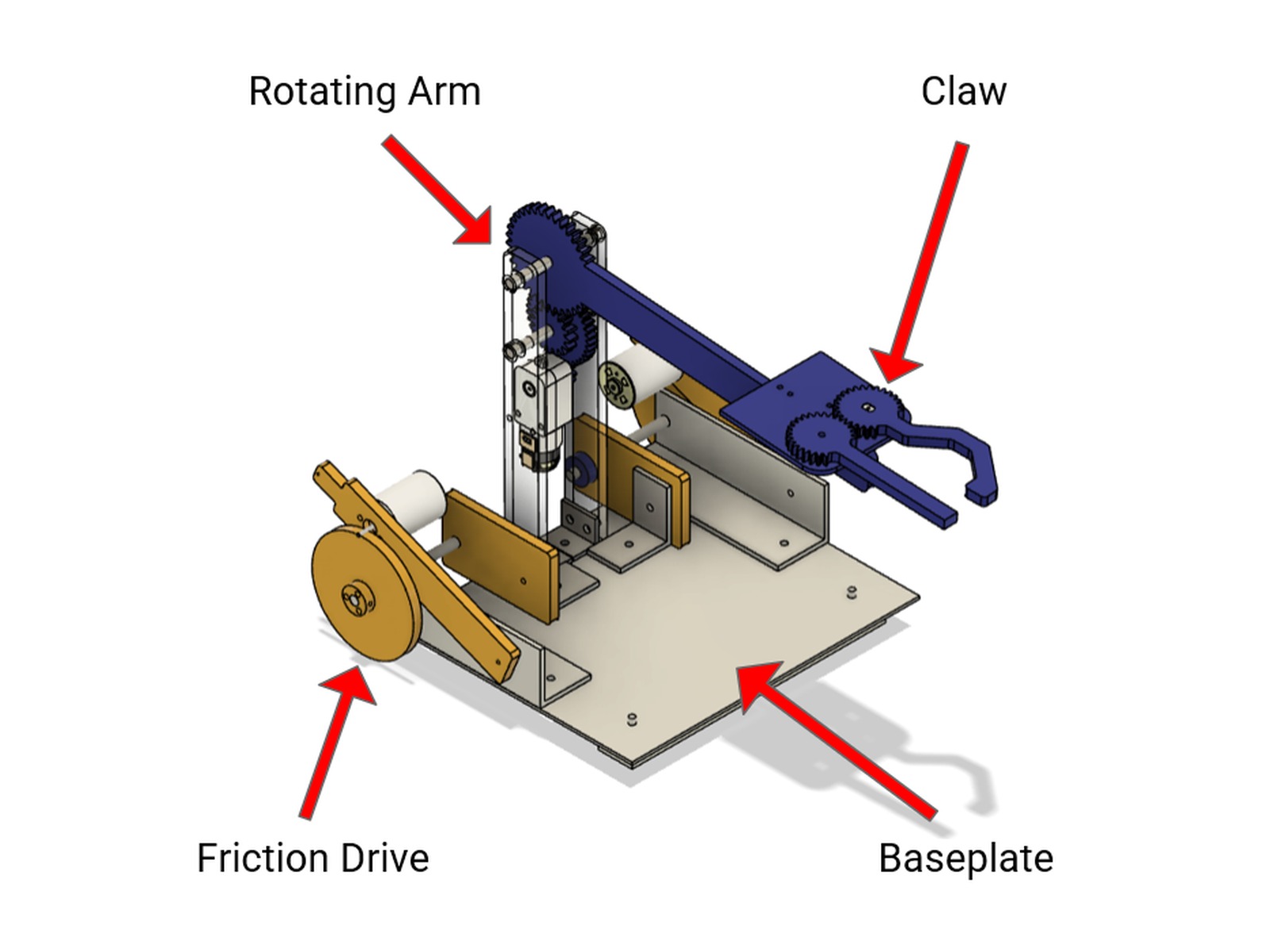
- Claw: interlocking spur gears that open and close the gripper arms.
- Rotating arm: a 6.75:1 compound gear train driven by a geared DC motor.
- Friction drivetrain: motors, mounts, axle holders, and friction wheels.
- Quasi-static force analysis and free body diagrams; aluminum and 3D Printing parts.
- Electrical: hand-soldered the motor and switch wiring for the drivetrain.
Results
- Lifted a 250 g payload (390 g total), beating the 300 g target.
- Drivetrain produced 3.48 N pushing force versus a 2.5 N requirement.
- Scored double the point target on the competition table.
Tools & methods
- Fusion 360
- AutoCAD
- Laser cutter
- 3D printing
- Machining
- Soldering
Next project
eVTOL Wildfire-Response Quadcopter